Review and Enhancement of Remotely Operated Vehicles for Marine Pest Surveillance: Phase 2 Project Report
Ellard, K.
The Tasmanian ROV Project, which explored the utilization of observation-class ROVs for marine pest surveillance programs, was completed in two…
Review and Enhancement of Remotely Operated Vehicles for Marine Pest Surveillance Project Report
Ellard, K.
ROVs are important tools for marine pest surveillance programs. In this report, the author explores observation-class ROVs and explores how…
Autonomous Lionfish Harvester
Lombardi, J.; Godsey, W.
Lionfish are indiscriminate predators with few to no predators of their own in the Caribbean region. In this paper, the…
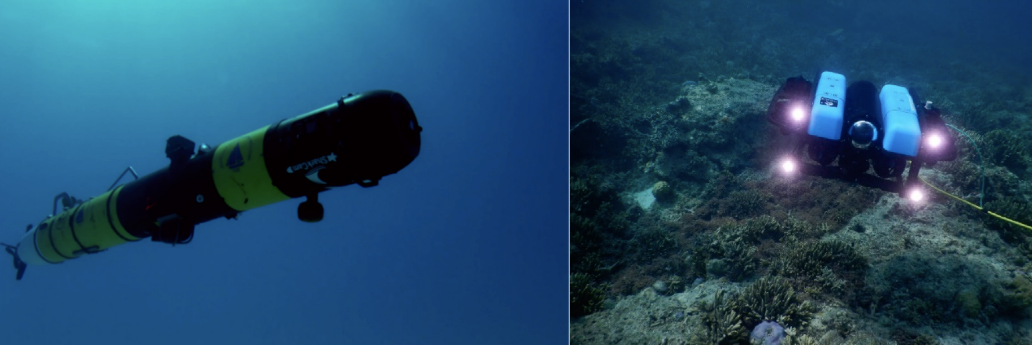
From Market-Ready ROVs to Low-Cost AUVs
Scharff Willnersb, J.; Carluchoa, I.
AUVs are increasing in popularity and can be used for various applications, but tend to be super expensive. In this…
The Drone Revolution of Shark Science: A Review
Butcher, P. A.; Colefax, A. P.
Drones are everywhere these days and have endless uses. One application that is increasing in popularity is wildlife management. In…
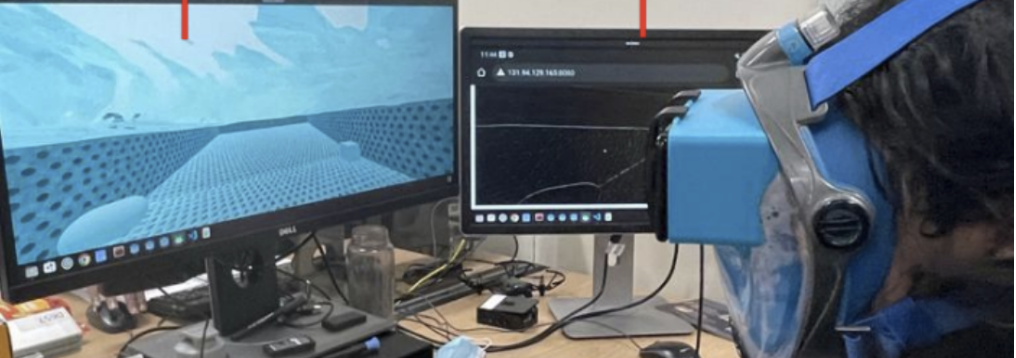
Towards Optimal Human-Robot Interface Design Applied to Underwater Robotics Teleoperation
Padrao, P.; Fuentes, J.
In order to expand the user base of operators and enable new applications in the ROV world, it is necessary…
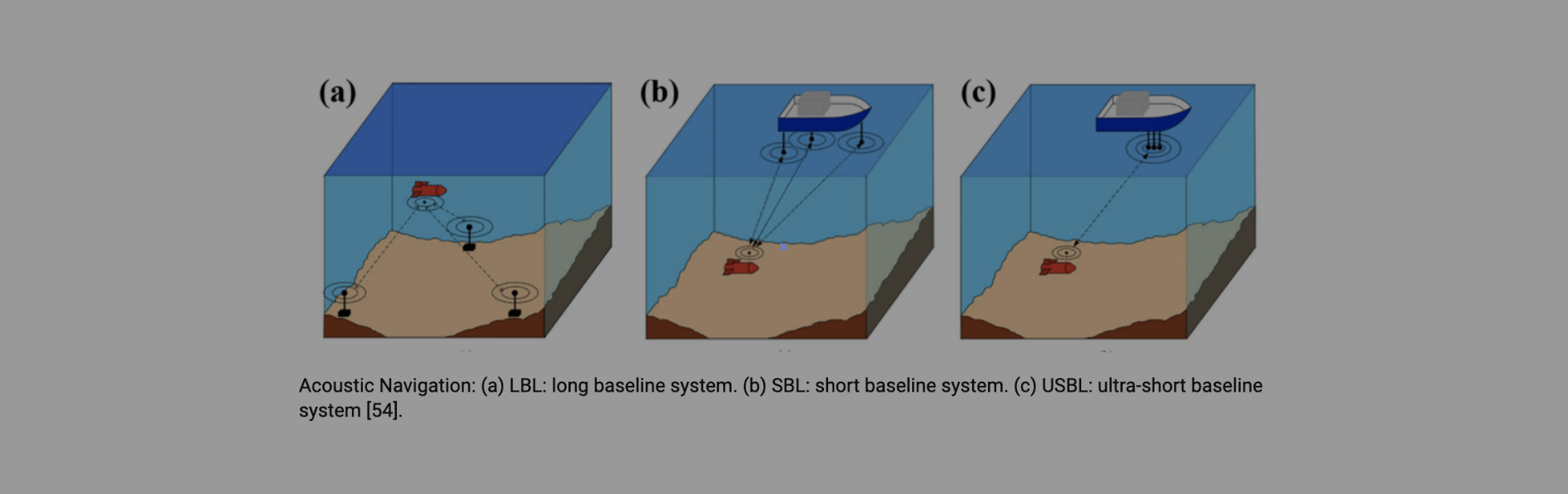
Survey on Low-Cost Underwater Sensor Networks: From Niche Applications to Everyday Use
Apr 10, 2023
-
Nicolette Purcell
A need for low-cost acoustic communication and positioning systems has increased with the rise in affordable ROVs and AUVs in…
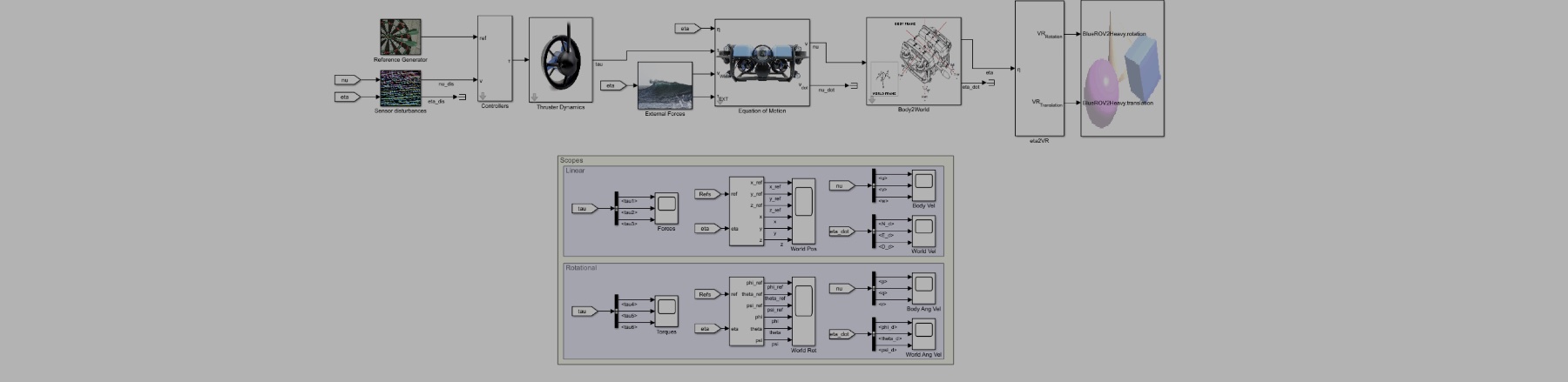
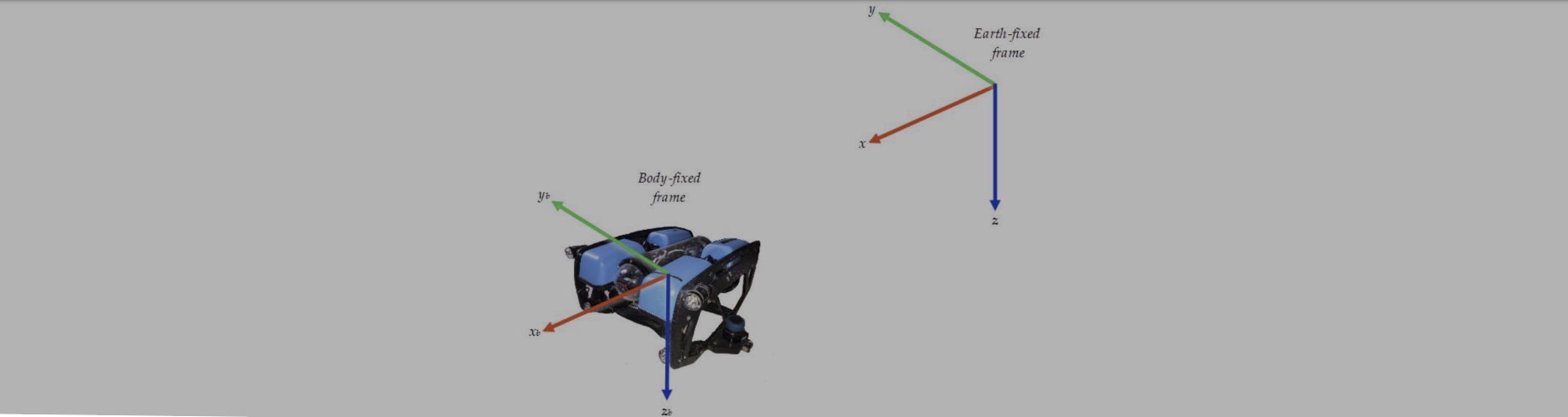
An Open-Source Benchmark Simulator: Control of a BlueROV2 Underwater Robot
von Benzon, M.; Fogh Sørensen, F
In this paper, the authors explore the use of Simulink, a MATLAB-based graphical programming environment for modeling, simulating, and analyzing…
Light Guided, Autonomous, and Mobile Underwater Tracking of an Unmanned Underwater Vehicle
Whitaker, C.
Since Unmanned Underwater Vehicles have numerous applications and are affordable, they are used frequently. Accurate position estimation makes UUVs more…
Model-Free High Order Sliding Mode Control with Finite-Time Tracking for Unmanned Underwater Vehicles
González-García, J.; Narcizo-Nuci, N.
Unmanned Underwater Vehicles are used for numerous applications, but have a tracking problem as their six Degree of Freedom (DOF)…