If you haven’t seen it, we are building an autonomous solar-powered surface vessel with the BlueRobotics Thrusters. Check out more details at: Hackaday Project Site: SolarSurfer.
We completed the second test of the SolarSurfer in the ocean. Last time, we only had an RC receiver and we drove it around manually. This time, it had a full blown autopilot with GPS, compass, and an IMU.
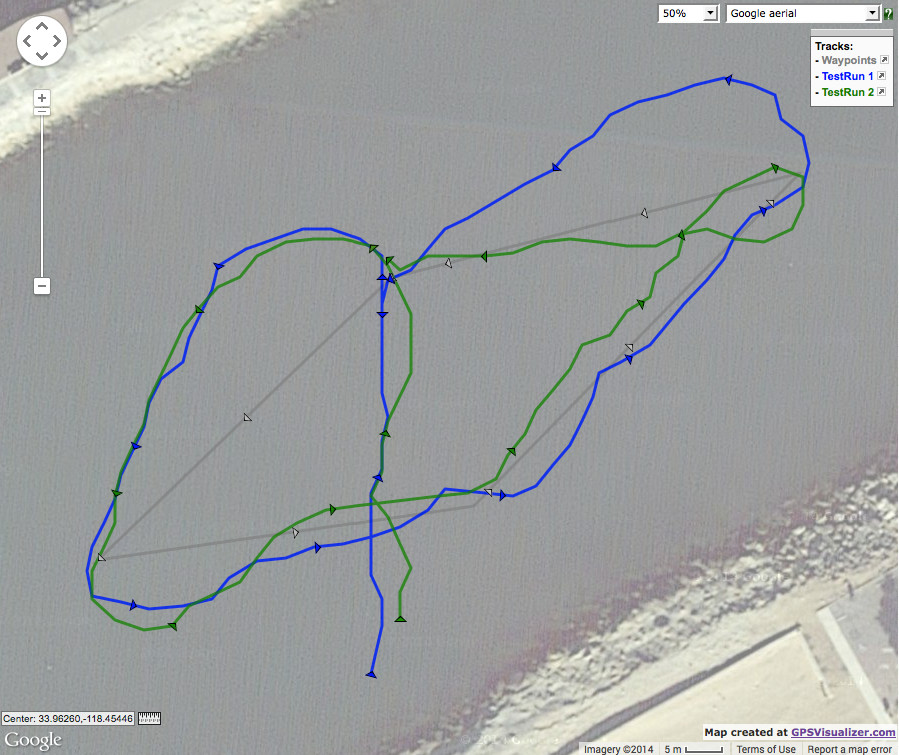
We stored at set of waypoints in the autopilot’s memory. When switched into autonomous mode (via the RC transmitter) it automatically navigated between the waypoints. Amazingly, it was totally successful on the first try. Check out the map image that shows the waypoint path and the two test runs. There’s an interactive version here.