Specifications
| Parameter | Value |
| Performance |
| Full Throttle FWD/REV Thrust @ Nominal (16 V) | 5.25 / 4.1 kg f | 11.6 / 9.0 lb f |
| Full Throttle FWD/REV Thrust @ Maximum (20 V) | 6.7 / 5.05 kg f | 14.8 / 11.1 lb f |
| Minimum Thrust | 0.02 kg f* | 0.05 lb f* |
| Electrical |
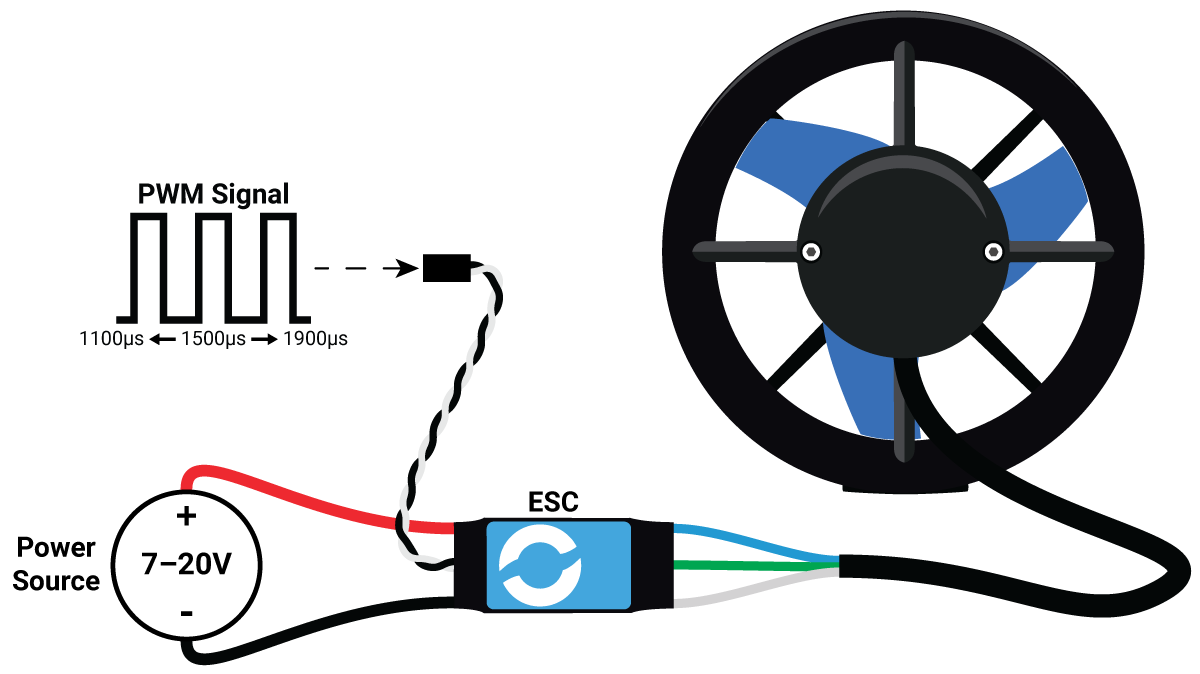
| Operating Voltage | 7–20 volts |
| Full Throttle Current @ Nominal (16 V) | 24 Amps |
| Full Throttle Current @ Maximum (20 V) | 32 Amps |
| Full Throttle Power @ Nominal (16 V) | 390 Watts |
| Full Throttle Power @ Maximum (20 V) | 645 Watts |
| Physical |
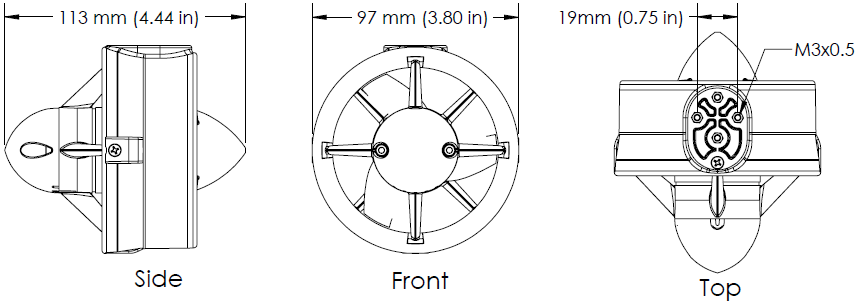
| Length | 113 mm | 4.45 in |
| Diameter | 100 mm | 3.9 in |
| Wetted Materials | Polycarbonate
Epoxy
Stainless steel
Plastic
Polyurethane
7075-T6 Aluminum
FKM
Buna-N |
| Weight in Air (with 1m cable) | 0.76 lb | 344 g |
| Weight in Water (with 1m cable) | 0.34 lb | 156 g |
| Propeller Diameter | 76 mm | 3.0 in |
| Mounting Hole Threads | M3 x 0.5 |
| Mounting Hole Spacing | 19 mm | 0.75 in |
| Cable |
| Cable Used | BR-100997 |
| Cable Length | 0.71 m | 28 in |
| Conductor Gauge | 16 AWG |
| Installed Penetrator | WLP-M10-6.5MM-LC |
*Values limited by ESC used to drive thruster.
Note that nominal operation at 12-16 V is recommended for the best balance of thrust and efficiency, though operation at up to 20 V is allowable. Exceeding 20 V is not within the rating and not recommended, please see here for more information.
For more detailed performance specifications, including thrust, RPM, power, and efficiency at various throttle levels and supply voltages from 10-20 V, please see the performance charts below.
Performance Charts
Click on the legend to hide or show the data set for each voltage. All the raw data and notes on the testing procedure used to generate these charts can be downloaded here:
T200-Public-Performance-Data-10-20V-September-2019 (.xlsx)
T200 Thruster Performance
Thrust at 10-20 V
Current Draw at 10-20 V
Efficiency at 10-20 V
Thrust and Power at 10-20 V
RPM at 10-20 V
2D Drawings
3D Models
T200-THRUSTER-R1 (.zip)
Revision History
14 March 2023
- Serial number laser marking implemented
24 May 2021
- R2 – Initial Release
- Updated pre-installed penetrators to compression gland penetrators
07 July 2020
- Changed SKU from T200-THRUSTER-BROV2-SPARE-R1-RP to T200-THRUSTER-BROV2-SPARE-R1-VP so CW and CCW variations may be ordered. The opposite spare propeller is still included.
08 November 2019
- Changed stator from being epoxy coated to fully potted
- Added cooling holes to propellers
15 September 2019
- Changed finish of polycarbonate components from glossy to matte
19 September 2014