
We're on a missionto enable the futureof marine robotics
Game-Changing Cost
Our constant focus on cost and accessibility make our thrusters, components, USV, and underwater ROV the most affordable on the market.
Flexible & Expandable
Straightforward designs with open source software and hardware allow for customization, modification, and reconfiguration.
A Community of Explorers
Our products come with clear documentation and resources as well as a diverse community of subsea explorers, hobbyists, and professional users.
Happenings & Highlights
Happenings & Highlights



Latest Products
-

JST GH Extension Cables
4 and 6-pin plug to receptacle JST GH cables
View Product -

High-Power Tether Reel for OTPS
Tether reel for the Outland Technology Power Supply
View Product -

MarineSitu C3 Stereo Camera
1000 meter depth rated stereo vision camera
View Product -

BarXT Extended Submersion Depth/Pressure Sensors
For long-term submersion pressure and depth sensing
View Product
Featured Products
-

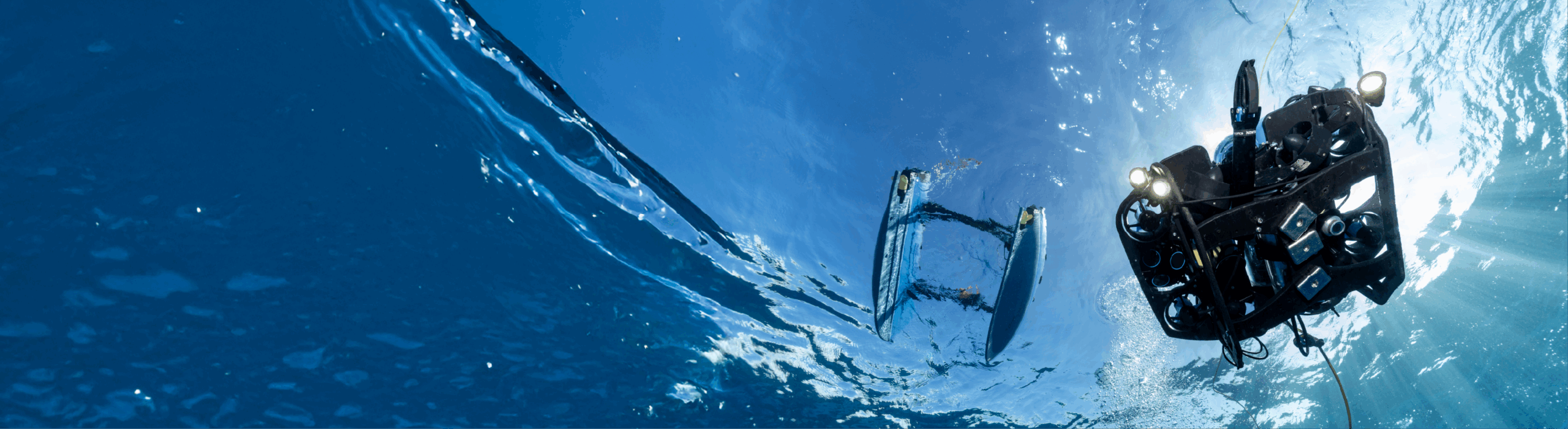
BlueBoat Uncrewed Surface Vessel
The planet’s most flexible and expandable surface vessel
View Product -

T500 Thruster
More thrust, more possibilities! 3x the thrust of the T200
View Product -

WetLink Penetrator
Compression gland seal for 3.7mm–9.8mm electrical cables
View Product -

Ping360 Scanning Imaging Sonar
Navigation and imaging sonar for BlueROV2 and other ROVs
View Product