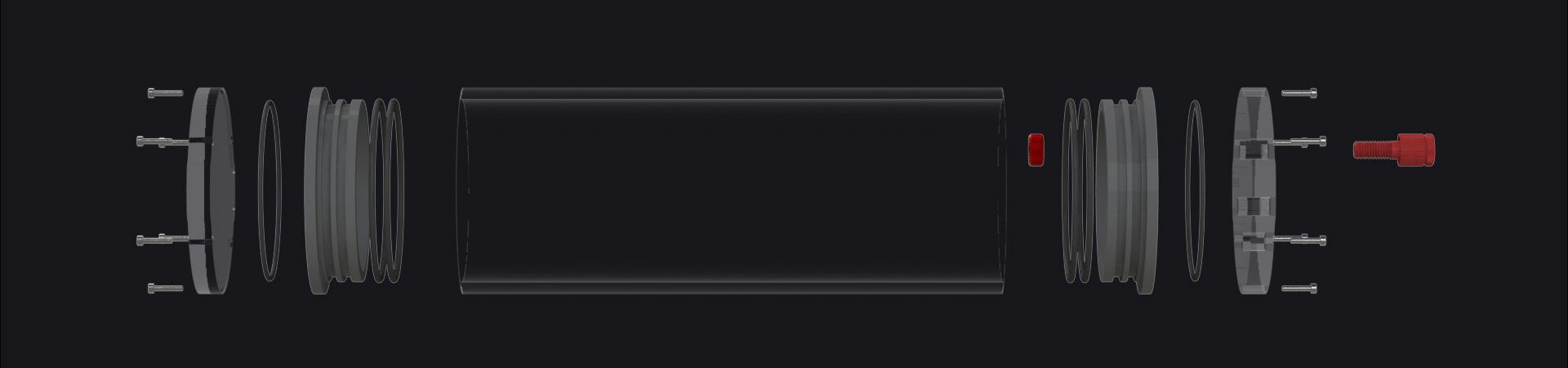
Introducing the Watertight Box!May 2, 2024 - Nicolette PurcellGood day blue people!!! 🤘 We are excited to add watertight boxes to our enclosure lineup! Although most subsea projects…
Ping2 Integration for BlueBoat + Newton Sediment Sampler!Feb 15, 2024 - Nicolette PurcellWe’re back again, blue folks! 💙 We’ve got another round of launches this week! This one’s for all the surveyors…
We made our locking enclosures way bigger and deconstructed the BlueBoat kit! - Nicolette PurcellCiao blue humans!!! 💙 We have ✌ launches to announce! We are stoked to introduce the 5″, 6″, and 8″…
Introducing the Sonoptix ECHO Multibeam Imaging Sonar!Oct 24, 2023 - Nicolette PurcellHello blue humans and bots!! (Is it weird that I assume they are reading this :)) Today we are stoked…
Introducing The Reef + Water Linked’s DVL A50!Jul 14, 2023 - Nicolette PurcellHello everyone! We are so so so pumped to announce a new initiative we’re launching today, with the release of…
Re-release of the M200 Motor!Jul 5, 2023 - Nicolette PurcellHello blue friends! It is with great joy that we announce the re(re)release of the M200 Motor! For those of…
New Product: WetLink Cable Splice Kit (+ a spLicy bet with Rusty and Eldin) - Nicolette PurcellHello humans! 🙂 We wanted to share that we’ve launched the WetLink Cable Splice Kit! It’s a little junction box…
New Products: Lithium-ion Mega Battery, T500 Propeller Sets, and Xbox Controller!Mar 13, 2023 - Nicolette PurcellHi there subsea friends! You may have seen that we’ve been working on some big stuff lately, but we’re still…
Our Original Watertight Enclosure Designs Are Now Open SourceJul 20, 2022 - Rustom JehangirWe’re happy to announce that we are making our original watertight enclosure designs fully open source and available for anyone…
BlueROV2 Updates: The New R4 Revision!Jun 8, 2022 - Rustom JehangirOur product launches over the last few weeks have been building up to today’s announcement: the new BlueROV2 R4 revision…